 DOC
DOC


【文档说明】河北省衡水市衡水中学2021届高三上学期11月物理试卷【精准解析】.doc,共(24)页,1.225 MB,由管理员店铺上传
转载请保留链接:https://www.doc5u.com/view-c45180f53d37355e00a55812a2863d71.html
以下为本文档部分文字说明:
-1-物理试卷考试说明:本次考试时间110分钟;总分110分。选择题把正确的答案涂答题卡上;主观题用书写黑色的签字笔在答题纸上作答。Ⅰ卷一、选择题:本题共15小题,为不定项选择,每题4分;部分2分,共6
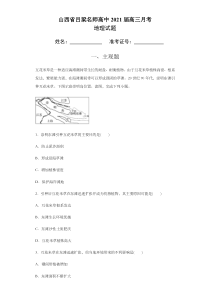
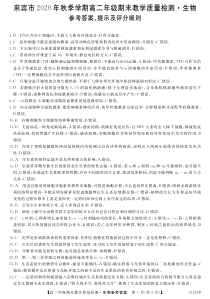
0分。1.四辆小车从同一地点向同一方向运动的情况分别如下图所示,下列说法正确的是()A.甲车做直线运动,乙车做曲线运动B.这四辆车均从静止开始运动C.在20t~时间内,丙、丁两车在时刻2t相距最远D.在20t~时间内,丙、丁两车间的距离先增大后减小【答案】C【解析】【分析】【详解】
A.x-t图象中,位移方向用正负表示,图中甲、乙两个物体的位移一直为正,且不断增加,故甲与乙都是单向的直线运动,故A错误;B.x-t图象的斜率表示速度,故乙车做减速直线运动,甲车做匀速直线运动,则甲车和乙车都不是从静止开始运动,故B错
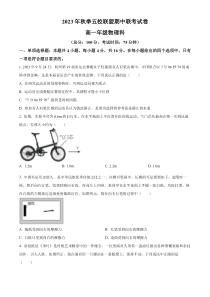
误;C.由图象与时间轴围成的面积表示位移可知:丙、丁两车在t2时刻面积差最大,所以相距最远,故C正确;D.在0~t2时间内,丁的速度大于丙的速度,两车间的距离一直增大,故D错误。故选C。2.如图所示,带正电的小球A用竖立在地面上的绝缘杆支撑,带正电的小球B用绕过A球正上方的定滑轮的绝缘细线拉着
,开始时A、B在同一水平线上并处于静止,不计两个小球的大小。现用手拉细线使小球B缓慢向上移动,小球B在向上移动过程中A、B两球的带电量保-2-持不变,不计两球间的万有引力,则在B球缓慢移动一小段距离的过程中()A.A、B两球间的距离在减小B.小球B的运动轨迹是一段圆弧C.细线上的
张力一直减小D.细线上的张力可能先变小后变大【答案】BC【解析】【分析】【详解】AB.设小球B受到的重力为mg,A、B两球的带电量分别为q1、q2,两球间的距离为r,定滑轮距离A球为h,距离B球为d,对B球受力分析如图根据相似三角形可知122kqqmgFrhdr==得312
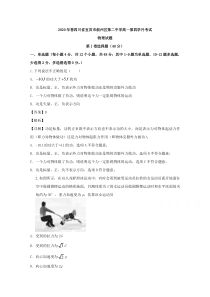
kqqhrmg=在小球移动过程中,r不变,因此小球的运动轨迹是一段圆弧,故A错误,B正确;-3-CD.又mgdFh=由于d在减小,因此F在减小,故C正确,D错误。故选BC。3.如图,海王星绕太阳沿椭圆轨道运动,P为近日点,Q为远日点,MN为
轨道短轴的两个端点,运行的周期为0T,若只考虑海王星和太阳之间相互作用,则海王星在从P经过M、Q到N的运动过程中()A.从P到M所用的时间小于04TB.从Q到N阶段,机械能逐渐变大C.从P到Q阶段,动能逐渐变小D.从M到N阶段,万有引力对它先做正功后做负功【答案】AC【解析】
【分析】【详解】A.由开普勒第二定律可知,海王星在段的PM速度大小大于MQ段的速度大小,则PM段的时间小于MQ段的时间,所以P到M所用的时间小于04T,故A正确;B.从Q到N的过程中,由于只有万有引力做功,机械能守恒,故B错误;C.从P到Q阶段,万有引力做负功,
动能减小,故C正确;D.根据万有引力方向与速度方向的关系知,从M到N阶段,万有引力对它先做负功后做正功,故D错误。故选AC。4.如图所示,分别用恒力F1、F2先后将质量为m的物体由静止开始沿同一粗糙的固定斜面由-4-底端拉至顶端,两次所用时间相同,第一次力F1沿斜面向上,第二次力F2沿水
平方向.则两个过程().A.物体动能变化量相同B.物体机械能变化量相同C.F1做的功与F2做的功相同D.F1做功的功率比F2做功的功率大【答案】AB【解析】【分析】两物体均做匀加速直线运动,在相等的时间内沿斜面上升的位移相等,但斜面对物体的摩擦力不同,所以推力做功
不同.【详解】A项:由公式2vxvtt==可知,2xvt=,所以两物体到达顶端的速率相等,所以动能的变化量相同,故A正确;B项:由A项分析可知,物体的动能增量相同,又由于处于相同的高度,所以两物体机械能增量相同,故B正确;C项:由图示
分析可知,第二个物体所受斜面的摩擦力较大,对每一个物体而言,除重力以外的合力对物体做功等于机械能的增量,由于两体的机械能增量相同,所以F2做功较多,故C错误;D项:由公式WPt=可知,由于时间相同,所以F1做功的功率比F2做功的功率
小,故D错误.【点睛】由物体的运动特征判断出物体机械能的增量关系,结合本题功能关系:除重力以外的合力对物体做功等于机械能的增量,不难看出结果.5.质量相等的均匀柔软细绳A、B平放于水平地面上,细绳A较长
。分别捏住两绳中点缓慢提起,使它们全部离开地面,两绳中点被提升的高度分别为Ah、Bh,上述过程中克服重力做-5-的功分别为AW、BW。以下说法正确的是()A.若ABhh=,则一定有ABWW=B.若ABhh>,则可能有ABWW<C
.若ABhh,则可能有ABWW=D.若ABhh>,则一定有ABWW>【答案】B【解析】【分析】【详解】A.因绳A较长,若ABhh=,则A的重心较低。故ABWW<。故A错误。BD.若ABhh,不能确定两根绳子重心的高低,可能ABWW<
,也可能ABWW>,还可能ABWW=。故B正确,D错误。C.若ABhh,则一定是A的重心低,那ABWW<。故C错误。故选B。6.要使小球A能击中离地面H高的小球P,设计了甲、乙、丙、丁四条内外侧均光滑轨道,如图所示.甲为高度小于H的倾斜平直轨道,乙丙丁均为圆轨道,圆心O如图所示.小球从地
面出发,初速度大小都为02vgH=,在甲轨道中初速度方向沿斜面,在乙、丙、丁轨道中初速度方向均沿轨道的切线方向,则小球A经过哪种轨道后有可能恰好击中P球()A.轨道甲和轨道丁B.轨道乙和轨道丁C.轨道丙和轨道丁
D.只有轨道丁【答案】D【解析】-6-【分析】【详解】小球从地面出发,初速度大小为2gH,在运动过程中,只有动能全部转化为重力势能才能上升高度H,即2012mgHmv=甲轨道A球在轨道上沿斜面运动后斜抛,在最高点有动能,根据机械能守恒,小球不能到达H高度,故甲不可能;
乙轨道小球做竖直上抛运动,在最高点速度为零,能达到高度H,但不能击中P点,故乙轨道不可能;丙轨道在小球通过1/4圆以后小球要想到达P点,在P点要有动能,根据机械能守恒,小球到不了P点,故丙轨道不可能;丁轨道小球到
达P点,小球的动能完全转化为重力势能,到达P点动能恰好为零,小球恰好击中P点,故丁轨道可以.故选D。7.如图所示,在倾角为30°的斜面上的P点钉有一光滑小铁钉,以P点所在水平虚线将斜面一分为二,上部光滑,下部粗糙。一绳长为3R轻绳一端系与斜面
O点,另一端系一质量为m的小球,现将轻绳拉直小球从A点由静止释放,小球恰好能第一次通过圆周运动的最高点B点,已知OA与斜面底边平行,OP距离为2R,且与斜面底边垂直,则小球从A到B的运动过程中()A.合外力做功12mgRB.重力做功mgRC.克服摩擦力做功
34mgRD.机械能减少14mgR【答案】D-7-【解析】【分析】【详解】A.以小球为研究的对象,则小球恰好能第一次通过圆周运动的最高点B点时,绳子的拉力为0,小球受到重力与斜面的支持力,重力沿斜面向下
的分力恰好通过向心力,则有2sin30BmvmgR=解得sin300.5BvgRgR==小球从A到B的运动过程中,合外力做功等于动能的增加,合外力做功为21412BmWmvgR==合故A错误;B.小球从A到B的运动过程
中,重力做功为sin3012WRmmgRg==G故B错误;C.小球从A到B的运动过程中,设摩擦力做功为fW,根据动能定理可得2102fGBWWmv+=−解得14fWmgR=−即物体克服摩擦力做功为14mgR,故C错误;D.由于物体克服摩擦力做功为14mgR,根据功能关系可知机械能损失为14mgR
,故D正确;故选D。8.有一个固定的光滑直杆与水平面的夹角为53°,杆上套着一个质量为m=2kg的滑块A(可视为质点),用不可伸长的轻绳将滑块A与另一个质量为M=2.7kg的物块B通过光滑的定滑轮相连接,细绳因悬挂B而
绷紧,此时滑轮左侧轻绳恰好水平,其长度10m3L=,P点与滑轮的连线同直杆垂直(如图所示),现将滑块A从图中O点由静止释放,(整个运动过程中B不会触地,210m/sg=),下列说法正确的是()-8-A.滑块A
运动到P点时加速度为零B.滑块A由O点运动到P点的过程中,物块B机械能增加C.滑块A经过P点的速度大小为52m/sD.滑块A经过P点的速度大小为14m/s【答案】C【解析】【分析】【详解】A.滑块A运动到P点时,垂直于杆子的方向受力平衡
,合力为零;沿杆子方向重力有沿杆向下的分力加mgsin53°,根据牛顿第二定律得mgsin53°=maa=gsin53°故A错误。B.滑块A由O点运动到P点的过程中,绳子的拉力对滑块B做负功,其机械能减少
,故B错误。CD.由于图中杆子与水平方向成53,可以解出图中虚线长度l=Lsin53°=83mB下落H=L-l=23m当A运动到P点与A相连的绳子此时垂直杆子方向的速度为零,则B的速度为零,以两个物体组成
的系统为研究对象,由机械能守恒定律得MgH+mgh=212mv解得-9-v=52m/s故C正确,D错误。故选BC。9.一个质量为0.5kg的小钢球竖直下落,落地时速度大小为1m/s,与地面作用0.1s
后以等大的动量被反弹.小钢球在与地面碰撞的过程中,下列说法中正确的是()A.小钢球重力的冲量是0.1kg·m/sB.若选向上为正方向,则小钢球的动量变化是1kg·m/sC.若选向上为正方向,则小钢球受到的合力冲量是-1N·sD.若选向上为正方向,则小钢球的
受到的合力为5N【答案】B【解析】A、根据冲量定义可知:0.5100.10.5/Imgtkgms===,故A错;B、若选向上为正方向,则小钢球的动量变化量为()220.511/Pmvmvmvkgms=−−==
=,故B对;C、根据动量定理,合力冲量等于动量的变化量,所以若选向上为正方向,则小钢球受到的合力冲量是1?/1kgmsNs=,故C错;D、已知合力的冲量为1?/1kgmsNs=,所以合力的大小为1100.1IFNt===,故D错;故选B10.如图所示,
半径为R=0.4m的圆形光滑轨道固定在竖直平面内,圆形轨道与光滑固定的水平轨道相切.可视为质点的质量均为m=0.5kg的小球甲、乙用轻杆连接,置于圆轨道上,小球甲与圆心O点等高,小球乙位于圆心O的正下方.某时刻将两小球由静
止释放,最终它们在水平面上运动.g=10m/s2.则()A.两小球最终在水平面上运动的速度大小为2m/sB.甲小球下滑到圆形轨道最低点时重力的功率为10W-10-C.甲小球下滑到圆形轨道最低点时对轨道压力的大小为5ND
.整个过程中轻杆对乙做的功为1J【答案】AD【解析】整个过程中,甲、乙组成的系统机械能守恒,最后两者的速度大小相等,应用机械能守恒:2122mgRmv=,得2m/sv=,选项A正确;下滑到最低点时速度水平,重力的功率为0,选项B错误;
甲小球下滑到最低点时,重力与支持力的合力提供向心力2NvFmgmR−=,解得210NNFmg==,由牛顿第三定律得,甲小球下滑到最低点对轨道压力的大小为10N,选项C错误;整个过程中对乙受力分析可知,重力不做功,乙小
球动能的增量等于轻杆对乙做的功211J2Wmv==,选项D正确;故选AD.点睛:本题关键时明确两个球的系统机械能守恒,而单个球的机械能不守恒,同时要结合动能定理分析杆对单个物体的做功情况,还要找到向心力
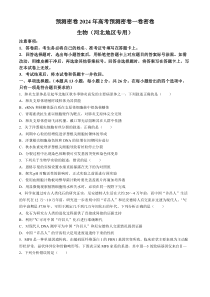
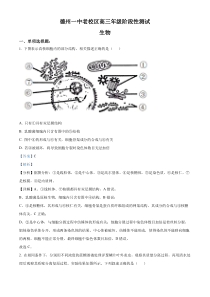
来源.11.静止在地面上的物体在竖直向上的恒力作用下上升,在某一高度撤去恒力.若不计空气阻力,则在整个上升过程中,下列关于物体的速度大小v、机械能E、重力势能Ep、动能Ek随时间变化的关系中,大致正确的是(取地面为零势面)()A.B.C.D.【答案】D【解析】【分析】【详解】A.撤
去F前v=at-11-v-t图象是过原点的直线.撤去F后v=v0-gtv-t图象是向下倾斜的直线;故A错误;B.设物体在恒力作用下的加速度为a,由功能原理可知机械能增量为212EFhFat==知E-t图象是开口向
上的抛物线.撤去拉力后,机械能守恒,则机械能随时间不变;故B错误;C.以地面为参考平面,撤去恒力前,重力势能为212PEmgat=Ep-t图象是开口向上的抛物线.撤去拉力后201()2PEmgvtat=−Ep应先增大后减小;故C错误;D.撤去恒力前,动能为21()2k
Emat=Ek-t图象是开口向上的抛物线(右支).撤去拉力后201()2kEmvgt=−Ek-t图象是开口向上的抛物线(左支),故D正确。故选D。【点睛】解决本题的关键是要明确物体的运动情况,掌握功能关系以及动能、重力势能的决定因素,根据表达式来分析图象
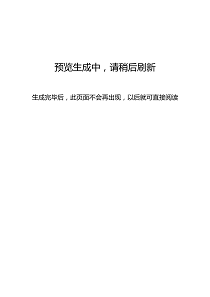
的形状。12.如图甲所示,长木板B放在光滑的水平面上,质量为m=4kg的小物块A可视为质点,以水平速度v0=3m/s滑上原来静止的长木板B的上表面,由于A、B间存在摩擦,导致A、B的速度随时间变化情况如图乙所示,取g=10m/s2,则下列说法正确的
是A.A、B之间的滑动摩擦因数为0.1-12-B.物块A克服摩擦力做功为16JC.木板B获得的最大动能为2JD.A、B系统产生的热量为12J【答案】BD【解析】【分析】【详解】A:由图乙得,A、B间相对滑动时,物体A的加速度大小22131/2/10am
sms−==−;物体B的加速度大小22210/1/10amsms−==−;对A受力分析,由牛顿第二定律可得:1mgma=,解得:A、B之间的滑动摩擦因数0.2=.故A项错误.B:由图乙得:物体A在0~1s内位移31122Axmm+==,摩擦力对
A做的功0.2410216fAWmgxJJ=−=−=−,则物块A克服摩擦力做功为16J.故B项正确.C:对B受力分析,由牛顿第二定律可得:2mgMa=,解得:木板B的质量8Mkg=,木板B获得的最大动能221181422kBEMvJJ===.故C项错误.D:由图乙得
,两物体间相对位移1311.52smm==,则A、B系统产生的热量0.24101.512QmgsJJ===.故D项正确.点睛:本题的关键是正确对木板和物块受力分析、运动分析,结合牛顿第二定律、运动学公式、功能关系等求解.13.如图所示,一轻质弹簧固定在光滑杆的下端,弹簧的中心轴
线与杆重合,杆与水平面间的夹角始终为60°,质量为m的小球套在杆上,从距离弹簧上端O点的距离为02x的A点静止释放,将弹簧压至最低点B,压缩量为0x,不计空气阻力,重力加速度为g。下列说法正确的是()-13-A.小球从接触弹簧到将弹簧压至最低点B的过程
中,其加速度一直减小B.小球运动过程中最大动能可能为0mgxC.弹簧劲度系数大于032mgxD.弹簧最大弹性势能为0332mgx【答案】CD【解析】【分析】【详解】A.小球从接触弹簧到将弹簧压至最低点B的过程中,弹簧对小球
的弹力逐渐增大,开始时弹簧的弹力小于小球的重力沿杆向下的分力,小球做加速运动,随着弹力的增大,合力减小,加速度减小;后来,弹簧的弹力等于小球的重力沿杆向下的分力,小球的加速度为零;最后,弹簧的弹力大于小球的重力沿杆向下的分力,随着弹力
的增大,合力沿杆向上增大,则加速度增大;所以小球的加速度先减小后增大,故A错误;B.小球滑到O点时的动能为k002sin603OEmgxmgx==小球的合力为零时动能最大,此时弹簧处于压缩状态,位置在O点下方,所以小球运动过程中最大动能大于03mgx,故B错误;C.在速度最大的位置有s
in60mgkx=因为x<x0,所以-14-032mgkx故C正确;D.小球到B时弹簧形变量最大,弹性势能最大;小球从A到B的过程,对系统由机械能守恒定律得,弹簧最大弹性势能Pm00333sin602Emgxmgx==故D正确。14.如图所示,足够大的绝缘水
平面上有一质量为m、电荷量为q−的小物块(视为质点),从A点以初速度0v水平向右运动,物块与水平面间的动摩擦因数为。在距离A点L处有一宽度为L的匀强电场区,电场强度方向水平向右,已知重力加速度为g,场强
大小为2mgEq=。则下列说法正确的是()A.适当选取初速度0v,小物块有可能静止在电场区B.适当选择初速度0v,小物块可能回到A点C.要使小物块穿过电场区域,初速度0v的大小应大于22gLD.若小物块能穿过电场区域,小物秧在穿过电场区的过程中,机械能减少3mgL
【答案】CD【解析】【分析】【详解】A.物块进入电场后,水平方向受到向左的电场力和摩擦力,则有2FEqmgmg==电即在电场区内,小物块不可能受力平衡,小物块不可能最终静止在电场区内,故A错误;-15-B.由于
摩擦力做负功,物块不会回到出发点A,故B错误;C.要使小物块能穿过电场区域,则穿出时速度大于零,运用动能定理得20102-2mvmgLEqL−=−解得022vgL=所以要使小物块穿过电场区域,初速度0v的大小应大于22gL,故C正确;D.小物块在穿过电场区的过程中,电场力和摩
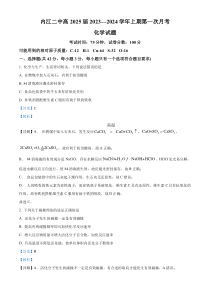
擦力做功3WFLmgLmgL=−=−电机械能减小3mgL,故D正确。故选CD。15.如图所示,倾角为370的足够长的传送带以恒定速度运行,将一质量m=1kg的小物体以某一初速度放上传送带,物体相对地面
的速度大小随时间变化的关系如图所示,取沿传送带向上为正方向,g=10m/s2,sin37°=0.6,cos37°=0.8.则下列说法正确的是()A.物体与传送带间的动摩擦因数为0.75B.0~8s内物体位移的大小为14mC.0~8s内物体机械能的增量为84JD.0~8s内物体与传送带之
间因摩擦而产生的热量为126J【答案】BD【解析】【分析】【详解】根据v-t图象的斜率表示加速度,可得,物体相对传送带滑动时的加速度大小为:222/1/2vamsmst===,由牛顿第二定律得:μmgcosθ-mgsinθ=ma,解得:μ=0.
875,-16-故A错误;根据速度图象的“面积”大小等于位移,则得物体在0-8s内的位移为:1262241422xm+=−+=,故B正确;物体被送上的高度为:h=ssinθ=8.4m,重力势能的增量为
:△Ep=mgh=84J,动能增量为()()22222111142622KEmvvJJ=−=−=,所以机械能增加为:△E=△Ep+△Ek=90J,故C错误;0-8s内只有前6s内物体与传送带间发生相对滑动.在0-6s内传送带运动的距离
为:s带=v带t=4×6m=24m,物体的位移为:14224622sm=−+=物,则物体与传送带的相对位移大小为:△s=s带-s物=18m,产生的热量为:Q=μmgcosθ•△s=0.865×1×10×0.8×18J=126J,故D正
确.所以BD正确,AC错误.二、实验题:(16题2分,17题10分,共12分)16.某同学用“探究功与速度变化的关系”实验中的装置,测小滑块与桌面间的动摩擦因数,如图甲所示,水平桌面离地面高度为h,将橡皮筋的两端固定在
桌子边缘,并且使橡皮筋恰好伸直,将小滑块置于橡皮筋的中点,垂直桌边缘水平向左移动距离s,使橡皮筋产生形变,由静止释放后,小滑块飞离桌面,测得其平抛的水平射程l.改变橡皮筋的条数,重复实验.不计空气阻力,重力加速度为g.(1)某次实验中,小滑块离开桌面
后的水平射程为l,则该次实验中小滑块离开桌面时的速度可表示为_________(使用题中所给物理量的符号表示);(2)取橡皮筋对小滑块做W为横坐标,小滑块离开桌面后的水平射程l的平方(2l)为纵坐标,描点得到一条直线如图乙所示,直线与横轴的截距为b,斜率为k,则小滑块与桌面间的动摩擦因数可表示为_
________(使用题中所给物理量的符号表示).【答案】(1).(1)2glh(2).(2)4bsh【解析】(1)小滑块抛出后做平抛运动,根据212hgt=,得出2htg=,则小滑块离开桌面时的速度-17-2gvt
h==(2)根据动能定理得2211222gWmgsmvmh−==,则244hWhsmg=−,所以4bhs=,计算得出小滑块与桌面间的动摩擦因数4bhs=【点睛】小滑块抛出后做平抛运动,根据平抛运动公式求出平抛的初速度,再根据动能定理列式求解即可.17.某学习小组用如图甲所示的装置验
证机械能守恒定律,质量均为M的物体A和B系在轻质细绳两端跨过光滑轻质定滑轮,每个钩码的质量均为0m,物体A上固定一轻质挡光片,挡光片下方h处固定一光电门,用来测量物体上的挡光片通过该处的时间t.(1)某同学用游标卡尺测量挡光片的宽度d,测量结果如图乙所示,则挡光片宽度为_____cm.(2)在物体
A下面挂上一个钩码,让A、B及钩码组成的系统由静止释放,测出挡光片通过光电门的时间1t,则挡光片通过光电门的速率为___________(用题中给出的符号表示).(3)依次增加物体A下方钩码个数,让物体A由同一位置释放,分别测出挡光片通过光电门的时间2t、
3t、4t…;(4)设物体A下方所挂钩码个数为n,根据(3)中所测时间,描点作出21nt−图象如图丙所示,若在误差允许范围内满足图象斜率k=____,截距b=_____(均用题中符号表示),则证明机械能守恒定律成立.(5)由于系统运动过程中要受到摩擦及空气阻力
,若认为挂不同个数钩码时阻力相同,则实际描点作出的图象斜率会__________(填“偏大”“偏小”或“不变”).【答案】(1).0.860(2).1dt(3).02ghmMd(4).02mM(5).偏小-18-【解析】(
1)挡光片宽度为:0.8cm+0.05mm×12=0.860cm;(2)挡光片通过光电门的速率为1dvt=;(4)若机械能守恒,则2001()(2)2nmMghMghnmMv+−=+,且dvt=解得200212mghmtnMdM=−,则02=mghkMd,0=2mbM,即当
满足02=mghkMd,02mbM=时证明机械能守恒定律成立;(5)若考虑阻力,物体下落时要克服阻力做功,等效于m0gh减小,即表达式200212mghmtnMdM=−中斜率02=mghkMd减小.18.如图所示,倾角为30=坡道顶端距水平面高度2mh=
质量0.3kgm=的小物块A(可视做质点)从坡道顶端由静止滑下,进入水平面上的滑道时无机械能损失.为使A制动,將轻弹簧的一端固定在光滑水平滑道延长线M处的墙上,另一端恰位于滑道的末端O点.已知物块A与斜面间的动摩擦
因数36=,重力加速度210m/sg=.求:(1)物块在刚接触弹簧的时的动能;(2)若物块A能够被弹回到坡道上.则它能够上升的最大高度是多少.【答案】(1)3JkE=(2)12m3h=【解析】【分析】物块从静止下滑到斜面底端的过程中由动能定理求得物块在刚接触弹簧的时的动
能;物块A能够被弹回到坡道上,整个过程运用动能定理得出它能够上升的最大高度;解:(1)物块从静止下滑到斜面底端的过程中由动能定理得:cossinkhmghmgE−=得:3JkE=(2)设返回时能够达到的高度为1h,由整个过程运用动能定理得:-19
-11coscos0sinsinhhmghmghmgmg−−−=得:12m3h=19.如图所示,是一儿童游戏机的简化示意图。光滑游戏面板与水平面成一夹角,半径为R的四分之一圆弧轨道BC与长度为8R的AB直管道相切于B点,C点为圆弧轨道最高点(切线水平),管道底端
A位于斜面底端,轻弹簧下端固定在AB管道的底端,上端系一轻绳,绳通过弹簧内部连一手柄P。经过观察发现:轻弹簧无弹珠时,其上端离B点距离为5R,将一质量为m的弹珠Q投入AB管内,设法使其自由静止,测得此时弹簧弹性势能1sin20PEmgR=,已知弹簧劲度系数10si
nmgkR=。某次缓慢下拉手柄P使弹簧压缩,后释放手柄,弹珠Q经C点被射出,弹珠最后击中斜面底边上的某位置(图中未标出),根据击中位置的情况可以获得不同的奖励。假设所有轨道均光滑,忽略空气阻力,弹珠可视为质点。直管AB粗细不计,求:(1)调整手柄
P的下拉距离,可以使弹珠Q经BC轨道上的C点射出,落在斜面底边上的不同位置,其中与A的最近距离是多少?(2)若弹珠Q落在斜面底边上离A的距离为10R,弹珠Q离开弹簧前的最大速度是多少?【答案】(1)32RR+;(2)83
sin5gR【解析】【分析】【详解】(1)当P离A点最近(设最近距离为d)时,弹珠经C点速度最小,设这一速度为v0,弹珠经过C点时恰好对轨道无压力,mgsinθ提供所需要的向心力。所以02sinmgmRv=得-20-0sinvgR
=8R+R=21sin2gt得到的18sinRtg=201832xvtRR===32dRR=+(2)设击中P1点的弹珠在经过C点时的速度为vC,离开C点后弹珠做类平抛运动a=gsinθ10R-R=vCt又在(1)中得到18sinRtg
=9sin2cvgR=弹珠离开弹簧前,在平衡位置时,速度最大;设此时弹簧压缩量为x,根据平衡条件:mgsinθ=kx0取弹珠从平衡位置到C点的运动过程为研究过程,根据系统机械能守恒:取平衡位置重力势能为零22111(6)sin2102mPCEmvm
gRRmv+=++83sin5mvgR=20.如图所示,传送带与水平面之间的夹角30=,其上A、B两点间的距离L=5m,传送带在电动机的带动下以v=1m/s的速度匀速运动,现将一质量m=10kg的小物体(可视为质点)轻放在传送带的A点,已知小物体
与传送之间的动摩擦因数32=,在传送带将小物体从A点传送到B点的过程中,求:(取210m/sg=)(1)物体从A到B运动的时间;-21-(2)传送带对小物体做的功;(3)电动机多做的功。【答案】(1)5.2s;(2)255J;(3)270J【解析】【分析】【详解】
(1)如图,对小物体进行受力分析有由图分析知cosNmg=33cos1010N75N22fNmg====sin50Nmg=sinfmg>则小物体可以与传送带上静止根据牛顿第二定律sinfmgma−
=75N50N10a−=得-22-22.5m/sa=则匀加速的时间11s0.4s2.5tva===匀加速的位移22111m0.2m222.5vsa===则小物体匀速运动的位移为25m0.2m4.8ms=−=匀速运动的时
间224.8s4.8s1stv===则小物体从A到B所需时间为0.4s4.8s5.2st=+=(2)由功能关系知传送带对小物体做的功等于小物体机械能的增量22111sin3010110105J255J222JWmvmgs=+=+=(3)
在前0.4s时间内传送带运动的位移为210.4m0.4mSvt===所以摩擦产生的热量等于摩擦力乘以两物体间的相对距离,即()()21cos750.40.2J15JQmgSS=−=−=电动机做的功为255J15J270JW=+=2
1.如图甲所示,弯曲部分AB和CD是两个半径都为R1=0.3m的光滑圆弧轨道,中间的BC段是竖直的薄壁细圆管(细圆管内径略大于小球的直径),分别与上下圆弧轨道相切连接,BC段的长度L为0.2m.下圆弧轨道与光滑水平地
面轨道相切,其中D、A分别是上下圆弧轨道的最高点与最低点,整个轨道固定在竖直平面内.质量m=0.3kg的小球以一定的初速度从A点水平进入轨道(计算结果可以用根式表示)-23-(1)如果小球从D点以5m/s的速度水平飞出,求落地点与D点的水平距离;(2)如果小球能从D点以5m/s的速度水平飞出
,求小球过A点时对A点的压力大小;(3)如果在D点右侧平滑连接一半径R2=0.4m的半圆形光滑轨道DEF,如图乙所示,要使小球在运动过程中能不脱离轨道,求初速度大小的范围.【答案】(1)2xm=(2)44NN=(3)110m
/sv或225m/sv【解析】【分析】(1)小球从D点以5m/s的速度水平飞出后做平抛运动,由平抛运动的规律可求得落地点与D点的水平距离;(2)根据机械能守恒定律可求得小球经过A点的速度,在A点,由合力提供向心力,由牛顿定律求小球过圆弧A点时对轨道的压力;(3)要
使小球不脱离轨道,则小球可能由C点返回A点,也可能超过D点后沿DEF轨道回到A点,根据临界条件和机械能守恒定律可求得初速度的范围.【详解】(1)小球从D点以5m/s的速度水平飞出后做平抛运动由平抛运动规律可得:212hgt=据
题,则几何关系可知:220.30.20.8hRLmmm=+=+=代入数据解得:t=0.4s所以落地点与D点的水平距离:50.42Dxvtmm===(2)由A到D的过程,由机械能守恒定律可得:221122DAmghmvm
v+=在A点,由牛顿第二定律可得:2AvNmgmR−=联立解得:N=44N由牛顿第三定律知,小球过圆弧A点时对轨道的压力:44NNN==(3)讨论一:小球进入轨道最高运动到C点,之后原路返回-24-由机械能守恒定律,有:()2
112mgRLmv+=解得:110/vms=讨论二:小球进入轨道后恰好能通过圆弧最高点D,之后沿DEF运动而不脱离轨道在D点,则有:2vmgmR=,其中R=0.4m从A到D由机械能守恒定律可得:2221122mghmvmv+=解得:
225/vms=所以要使小球在运动过程中能不脱离轨道,初速度大小的范围为:110/vms或225/vms.【点睛】本题考查机械能守恒定律的应用以及平抛运动规律的应用,要注意正确分析物理过程,正确进行受力分析
,再通过平衡条件等选择正确的物理规律列式求解.关键要注意正确选择物理过程和规律.


