(全解全析)(北京专用)") DOC
DOC


【文档说明】(北京专用,人教版2019必修第一册第1_3章)(全解全析)(北京专用).docx,共(18)页,1.122 MB,由管理员店铺上传
转载请保留链接:https://www.doc5u.com/view-610b0cfe2c91b3e5d4223b6b40dd6bd0.html
以下为本文档部分文字说明:
2024-2025学年高一物理上学期期中模拟卷(考试时间:90分钟,分值:100分)注意事项:1.答卷前,考生务必将自己的姓名、准考证号等填写在答题卡和试卷指定位置上。2.回答选择题时,选出每小题答案后,用铅笔把答题卡上对应题目的答案标号涂黑。如需改动,
用橡皮擦干净后,再选涂其他答案标号。回答非选择题时,将答案写在答题卡上。写在本试卷上无效。3.测试范围:第1~3章,人教版2019必修第一册。4.难度系数:0.7一、选择题:本题共14小题,每小题3分,共42分。在每小题
给出的四个选项中,第1~10题只有一项符合题目要求。第.11~14.....题有多项符合题目要求..........,全部选对的得3分,选对但不全的得2分,有选错的得0分。1.小田同学想从学校骑行到天安门广场,他利用手机某地图APP进行导航,如图为导航界面的截图,其推荐路线中有两个数
据:16分钟、3.2千米,下列相关说法正确的是()A.研究小田在导航中的实时位置时,不可以把小田看作质点B.16分钟表示的是某个时刻C.此次行程的平均速度的大小约为3.33m/sD.此次行程的位移的大小
比3.2千米要小【答案】D【知识点】速率的概念、平均速率与瞬时速率、质点、时间、时刻的定义、平均速度【详解】A.研究小田在导航中的实时位置时,小田的大小、形状相对于所在空间可以忽略,故可以把小田看作质点,A错误;B.16分钟表示的是某个时间间隔,B错误;CD.图中所给数据16分钟为时间间隔
,3.2千米是路程,故此次行程的位移的大小比3.2千米要小,平均速度是总位移与所用时间的比值,路程与所用时间的比值是平均速率,故𝑣=𝑠𝑡=320016×60m/s=3.33m/sC错误,D正确。故选D。2.如图中,接触面光滑,对处于静
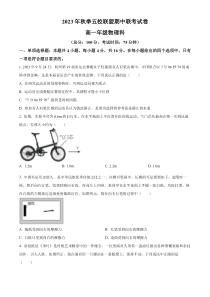
止状态的球的弹力分析正确的是()A.B.C.D.【答案】A【知识点】判断是否存在弹力【详解】A.球受到墙壁的弹力和台阶的弹力,弹力方向与接触面垂直,故墙壁的弹力垂直于墙壁向右,台阶对球的弹力垂直切面,通过球心,故A正确;B.假设斜壁
对小球有弹力,则小球受到重力、地面向上的弹力和斜壁斜向下的弹力,三个力的合力不为零,则小球将向右滚动,与题不符,故斜壁对小球没有弹力,小球只受地面向上的弹力,故B错误;C.假设斜壁对小球有弹力,则小球受到重力、地面向上的弹力和斜壁斜向上的弹力
,三个力的合力不为零,则小球将向右滚动,与题不符,故斜壁对小球没有弹力,小球只受地面向上的弹力,故C错误;D.假设斜面对小球有弹力,则小球受到重力、竖直向上的拉力和垂直于斜面向上的支持力,三个力的合力不为零,则小球将向左摆动
,与题不符,故斜面对小球没有弹力,故D错误。故选A。3.如图所示的装置中,小球的质量均相同,弹簧和细线的质量均不计,一切摩擦忽略不计,平衡时各弹簧的弹力分别为F1、F2、F3,其大小关系是()A.F1=F
2=F3B.F1=F2<F3C.F1=F3>F2D.F3>F1>F2【答案】A【知识点】利用平衡推论求力【详解】根据二力平衡,弹簧拉力均等于一个小球的重力,所以三力相等。故选A。4.某同学利用图甲所示装置研究摩擦力的变化情况。实验台上固定一个力传感器,传感器用棉线拉住
物块,物块放置在粗糙的长木板上。水平向左拉木板,传感器记录的F-t图像如图乙所示。下列说法正确的是()A.实验中木板可以向左变速运动B.图乙中曲线就是摩擦力随时间的变化曲线C.最大静摩擦力与滑动摩擦力之比约为1:1D.只用图乙中数据可得出物块与木板间的动摩擦因数【答案】A【知识点】最
大静摩擦力与滑动摩擦力的关系、利用力的平衡测量动摩擦因数【详解】AB.为了能研究摩擦力随时间的变化曲线,故物块一直要处于静止状态,则向左的摩擦力一直与向右轻绳的拉力平衡,图乙是向右轻绳的拉力随时间变化曲线,故图乙也可以反映摩擦力随时间变化的曲线,由
图乙知向右轻绳的拉力先增大后减小,最后趋于不变,故物块先受静摩擦力作用后受滑动摩擦力作用,所以不需要让木板保持匀速运动,可以向左变速运动,故A正确,B错误;C.由图可知,最大静摩擦力约为10N,滑动摩擦力约为7N,故最大静摩擦力与滑动摩擦力之比约为10:7,故C错误;D.根据f=μFN=μmg可知
,由于不知道物块的重力,故无法求物块与木板间的动摩擦因数,故D错误。故选A。5.如图所示,两人用同样大小的力共提一桶水静止不动,水不流出,则下列正确的是()A.无论怎样改变𝜃的大小,两手臂作用于桶的力的合力都不变B.无论怎样改变𝜃的大
小,两人都不会省力,因为一桶水的重力不变C.不论两人手臂间的夹角如何变化,每个人对水桶的拉力一定大于水和水桶的总重力D.不论两人手臂间的夹角如何变化,每个人对水桶的拉力都不会改变【答案】A【知识点】直接合成法解决三力平衡问题【详解】设两人的手臂
对水桶的拉力大小为F,由题两人的手臂夹角成𝜃角,根据对称性可知,两人对水桶的拉力大小相等,则根据平衡条件得2𝐹cos𝜃2=𝑚𝑔解得𝐹=𝑚𝑔2cos𝜃2A.一桶水静止不动,两手臂作用于桶的力的合力与水桶及水的重力等大反向,因此无论怎样改变𝜃的大小,两手臂作用于桶的力的合力都不变
,A正确;BC.由上述分析可知,当𝜃越小,F就越小,当𝜃=0时,F最小为12𝑚𝑔,两人都不会省力,BC错误;D.由上述分析可知,𝜃越小,F就越小,𝜃越大,F就越大,两人手臂间的夹角变化,每个人对水桶的拉力也会随之改变,D错误。故选A。6.在同一
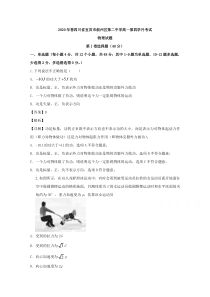
地点,甲、乙两个物体沿同一方向作直线运动的速度一时间图像如图,则()A.乙物体先向前运动2s,随后作向后运动B.两物体只在2s末相遇一次C.两个物体相距最远的时刻是4s末D.从第4s末到第6s末,甲在乙前面【答案】C【知识点】变速物体追匀速
物体【详解】A.乙物体在整个运动过程中速度都为正值,速度的方向不变,即运动的方向不变。故A错误;B.图线与时间轴围成的面积表示位移,从图像可知,在2s和6s,图线与时间轴围成的面积相等,则位移相等,两物体在2s末、6s末相遇两次。故B错误;C.在0-2s内,两物体的距离先增大后减
小,在t=1s时,速度相等,相距最远,最远距离Δ𝑥=12×1×2m=1m在2-6s内,两物体之间的距离先增大后减小,在t=4s时,速度相等,相距最远,最远距离Δ𝑥′=12×2×2m=2m知4s末相距最远。故C正确;D.在4
s时,乙的图线与时间轴围成的面积大于甲图线与时间轴围成的面积,知乙在甲的前面。故D错误。故选C。7.如图所示,木块A、B分别重50N和60N,与水平地面之间的动摩擦因数均为0.2。夹在A、B之间的轻弹
簧被压缩了2cm,弹簧的劲度系数为400N/m。用𝐹=2N的水平拉力拉木块B,木块A、B均保持静止。最大静摩擦力近似等于滑动摩擦力,下列说法正确的是()A.弹簧的弹力大小为80NB.木块A受到的摩擦力大小为10NC.木块
B受到的摩擦力大小为6ND.地面给A、B组成的系统的摩擦力大小为2N【答案】D【知识点】整体法与隔离法结合处理物体平衡问题、胡克定律及其应用、复杂受力情况下计算静摩擦力的大小【详解】A.弹簧弹力大小为𝐹弹=𝑘𝑥=400×0.02N=8N故A错误;B.施加水平拉力F后,弹簧长度
没有变化,弹力不变,故木块A相对地面有向左的运动趋势,其受到向右的静摩擦力,且与弹力平衡,木块A所受摩擦力大小为𝑓′A=𝐹弹=8N故B错误;C.木块B与地面间的最大静摩擦力为𝑓B=𝜇𝑚B𝑔
=0.2×60N=12N施加水平拉力F后,对B物体受力分析,重力与支持力平衡,水平方向受向右的弹簧弹力和拉力,由于B木块与地面间的最大静摩擦力为12N,大于弹簧弹力和拉力之和,故木块B静止不动,故木块B受到的静摩擦力与弹簧弹力和拉力的合力平衡,木块B所受摩擦力大小
为𝑓′B=𝐹弹+𝐹=8+2N=10N故C错误;D.对A、B组成系统,由平衡条件可知地面给A、B组成的系统的摩擦力𝑓=𝐹=2N故D正确。故选D。8.小杰学习自由落体运动后,用20cm的刻度尺测量同学的反应时间,测量方法如图所示,被测者用两个手指虚捏在尺子0刻线处,观察到小杰松开尺子时立刻
捏住尺子,读出手指所捏刻度h,下列说法正确的是()A.h越大,反应时间越短B.反应越慢,要捏住尺子时,尺子下落的速度越大C.该尺可以测量出0.4s的反应时间D.计算时若重力加速度g取10m/s2,则测算出的反应时间比实际值要大【答案】B【知识点】自由落体运
动的三个基本公式【详解】A.根据𝑡=√2ℎ𝑔可知,h越大,反应时间越长,选项A错误;B.反应越慢,要捏住尺子时所用的时间越长,根据v=gt可知,尺子下落的速度越大,选项B正确;C.该尺下落20cm用时间为𝑡=√2ℎ𝑔=√2×0.210s=0.2s则不可以测量出0.4s的反应时间,
选项C错误;D.计算时若重力加速度g取10m/s2,则根据𝑡=√2ℎ𝑔则测算出的反应时间比实际值要小,选项D错误。故选B。9.列车进站可简化为匀减速直线运动,在此过程中用t、x、v和a分别表示列车运动的时间、位移、
速度和加速度。下列图像中正确的是()A.B.C.D.【答案】D【知识点】a-t图像【详解】A.列车进站做匀减速直线运动,速度应越来越小,而A中x-t的斜率不变,表示其速度不变,故A错误;BC.根据题意可知,列车进站做匀减速直线运动,以初速方向为正方向,则a为负且大小恒定,故BC错
误;D.根据匀变速直线的运动规律,有𝑣2−𝑣02=2𝑎𝑥解得𝑣2=2𝑎𝑥+𝑣02以初速方向为正方向,则a为负且大小恒定,可知v2与x为线性关系,且斜率为负,故D正确。故选D。10.打印机是现代办公不可或缺的设备,正常情况下,进纸系统能做到“每
次只进一张纸”,进纸系统的结构如图所示.设图中刚好有10张相同的纸,每张纸的质量均为m,搓纸轮按图示方向转动时带动最上面的第1张纸匀速向右运动,搓纸轮与纸张之间的动摩擦因数为𝜇1,纸张与纸张之间、纸张与底部摩擦片之间的动摩擦因数均为𝜇2,工作时搓纸轮给第1张纸压力大小为F。重力加速度为g,打印
机正常工作时,下列说法正确的是()A.第1张纸受到搓纸轮的摩擦力方向向左B.第2张与第3张纸之间的摩擦力大小为2𝜇2𝑚𝑔C.第10张纸与摩擦片之间的摩擦力为𝜇2(𝑚𝑔+𝐹)D.要做到“每次只进一张纸”,应要求𝜇1<𝜇2【答案】C【知识
点】复杂受力情况下计算静摩擦力的大小、整体法与隔离法结合处理物体平衡问题【详解】A.因为是搓纸轮带动第一张向右运动,第1张纸上表面受到搓纸轮施加的摩擦力f,方向向右,选项A错误;D.第1张纸下表面受到第2张纸施加的滑动摩擦力𝑓′,方向向左,即有𝑓′=𝜇2(�
�𝑔+𝐹)F为搓纸轮对第1张纸的压力,要让纸张一张一张进入则需满足𝑓′=𝜇2(𝑚𝑔+𝐹)<𝜇1𝐹正常情况下F>>mg,故必有μ1>μ2选项D错误;BC.第2张与第3张纸之间的摩擦力及第10张纸与摩擦片之间的摩擦力都是静摩擦力,根据受力平衡条件可知其大小均为𝑓′=𝜇2(�
�𝑔+𝐹),选项B错误,C正确。故选C。11.下列各组物理量中,全部是矢量的有()A.力、位移、加速度B.重力、位移、速度C.时间、弹力、速度D.质量、位移、加速度【答案】AB【知识点】标量与矢量【详解】A.力、位移、加速度全都是矢量,A正确;B
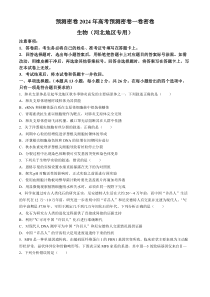
.重力、位移、速度全都是矢量,B正确;C.时间是标量,弹力和速度是矢量,C错误;D.质量是标量,位移和加速度是矢量,D错误。故选AB。12.摩天大楼中一部直通高层的客运电梯,行程可超过百米。考虑安全、舒适、省时等等因素,电梯的加速度a是随时间t变化的。
已知电梯在t=0时由静止开始上升,其图像如图所示。由此图像可知()A.电梯在第1s内做匀加速运动B.电梯在第1s末到第10s末之间的位移大小为45mC.电梯从第11s末到第30s末做匀速运动,速度大小为10m/sD.第41s末时,电梯回到原先所在的出发点
【答案】BC【知识点】a-t图像【详解】A.由图像可知,第一秒内电梯加速度向上逐渐增大,故电梯做加速度逐渐增大的加速运动,A错误;B.𝑎−𝑡图像面积表示速度变化量,故1s末速度为𝑣1=12×1×1m/s=0.5m/s10s末速度为𝑣10=12×(9+10)×
1m/s=9.5m/s电梯在第1s末到第10s末做匀加速运动位移大小为𝑥=12(𝑣1+𝑣10)𝑡=12(0.5+9.5)×9m=45mB正确;C.电梯第11s末的速度为𝑣11=12×(9+11)×1m/s=1
0m/s故电梯从第11s末到第30s末做匀速运动,速度大小为10m/s,C正确;D.由图像可知先向上加速,再匀速,最后减速,运动过程如下故第41s时停止运动,上升到最高点,D错误。故选BC。13.如图所示,质量为m的物体在恒力F作用下沿水平地面做匀速直线运动,物体与地面间动摩擦因数
为𝜇,则物体受到的摩擦力的大小为()A.𝐹sin𝜃B.𝜇(𝑚𝑔−𝐹cos𝜃)C.𝜇(𝐹sin𝜃+𝑚𝑔)D.𝐹cos𝜃【答案】AB【知识点】滑动摩擦力的大小与方向、正交分解法【详解】物体在水平方向做匀速直线运动,对物体进行受力分析,则由题意可得𝐹cos𝜃+𝐹𝑁
=𝑚𝑔𝑓=𝐹sin𝜃由摩擦力公式可得𝑓=𝜇𝐹𝑁=𝜇(𝑚𝑔−𝐹cos𝜃)故选AB。14.图甲、乙、丙体现了利用v-t图像推导匀变速直线运动位移公式的思路和方法。下列说法正确的是()A.可以把整个运动过程分割成很多小段,每小段
近似看作匀速直线运动,各小段位移之和可近似代表总位移B.这种用图像面积表示位移大小的方法只适用于匀变速直线运动C.用图中矩形面积之和表示位移大小,图甲得到的结果比图乙的更接近真实值D.若将图丙中纵坐标改为加速度,则图线下方阴影面积表示对应时间内的速度变化量【
答案】AD【知识点】v-t图像面积的物理意义、利用v-t图像求位移【详解】A.根据微元法,可以把整个运动过程分割成很多小段,每小段近似看作匀速直线运动,各小段位移之和可近似代表总位移,故A正确;B.这种用图像面积表
示位移大小的方法适用于任何直线运动,故B错误;C.𝑣−𝑡图像中图线与时间轴所围的面积表示位移,故用图中矩形面积之和表示位移大小,图乙得到的结果比图甲的更接近真实值,故C错误;D.根据Δ𝑣=𝑎Δ𝑡,若将图丙中纵坐标改为加速度,则图线下方阴影面积表示对应
时间内的速度变化量,故D正确。故选AD。第Ⅱ卷二、实验题:本题共3小题,共18分,每空2分。15.研究物体做匀变速直线运动的情况可以用打点计时器,也可以用光电传感器。(1)一组同学用打点计时器研究匀变速直线运动,打点计时器使用交流电源的频率是50Hz,打点计时器在小车拖动的纸带上打
下一系列点迹,以此记录小车的运动情况。图甲为某次实验打出的一条纸带,其中1、2、3、4为依次选中的计数点(各相邻计数点之间有四个点迹)。根据图中标出的数据可知,打点计时器在打出计数点3时小车的速度大小为m/s,小车做匀加速直线运动的加速度大小为m/
s2.(2)另一组同学用如图乙所示装置研究匀变速直线运动。滑块放置在水平气垫导轨的右侧,并通过跨过定滑轮的细线与一沙桶相连,滑块与定滑轮间的细线与气垫导轨平行。滑块上安装了宽度为3.0cm的遮光条,将滑块由静止释放,先后通过两个光电门,配套的数字计时器记录了遮光条通过第一个光电门的时间为
0.015s,通过第二个光电的时间为0.010s,遮光条从开始遮住第一个光电门到开始遮住第二个光电门的时间为0.250s。则滑块的加速度大小为m/s2。【答案】(1)①0.53②1.4(2)4.0【知识点】用逐差法计算加速度、用光电门研究匀变速运动、计算某点的瞬时速度【详
解】(1)①由于每相邻两个计数点间还有4个点,所以相邻的计数点间的时间间隔为t=0.1s,根据匀变速直线运动中间时刻瞬时速度等于该过程中的平均速度,可以求出打计数点3点时小车的瞬时速度大小𝑣3=𝑥242𝑡=
13.80−3.202×0.1×10−2m/s=0.53m/s②根据匀变速直线运动的推论公式△x=aT2可以求出加速度的大小𝑎=𝑥34−𝑥23𝑡2=(13.80−7.80)−(7.80−3.20)0.12×10−2m/s2=1.4m/s2(2)[4]遮光条通
过第一个光电门的速度为𝑣1=𝑑𝑡1=0.0300.015m/s=2.0m/s遮光条通过第二个光电门的速度为𝑣2=𝑑𝑡2=0.0300.010m/s=3.0m/s则滑块的加速度大小为𝑎=𝑣2−𝑣1𝑡=3−20.25m/s
2=4.0m/s216.如图1所示,某同学用铁架台、弹簧和多个已知质量且质量相等的钩码,探究“在弹性度内弹簧弹力与弹簧伸长量的关系”实验。重力加速度𝑔取10m/s2。(1)实验中还需要的器材有()A
.刻度尺B.天平C.弹簧测力计D.打点计时器(2)以钩码总质量𝑚为纵轴,弹簧形变量𝑥为横轴,建立坐标系,根据实验数据绘图,如图2所示。关于弹簧的弹力与弹簧的伸长量关系,以及弹簧劲度系数𝑘的数值,下列说法正确的是()A.弹簧的弹力与弹簧的伸长量成正比,𝑘=25.0N/mB
.弹簧的弹力与弹簧的伸长量成反比,𝑘=25.0N/mC.弹簧的弹力与弹簧的伸长量成正比,𝑘=2.5N/mD.弹簧的弹力与弹簧的伸长量成反比,𝑘=2.5N/m(3)如图3所示,实验中用两根不同的弹簧𝑎和𝑏,
作出弹簧弹力𝐹与弹簧长度𝐿的𝐹−𝐿图像,下列说法正确的是()A.𝑎的原长比𝑏的长B.𝑎的劲度系数比𝑏的大C.弹簧弹力与弹簧长度成正比D.根据图像无法比较弹簧𝑎和𝑏的劲度系数大小【答案】(1)A(2)A(3)B【知识点】探究弹力和弹簧伸长量的关系的
数据处理与误差分析、探究弹力和弹簧伸长量的关系的原理、器材与实验步骤【解析】(1)A.实验需要测量弹簧伸长的长度,需要刻度尺。故A正确;BC.由于钩码的质量已知,不需要天平和弹簧测力计,故BC错误;D.探究“在弹性度内弹簧弹力与弹簧伸长量的关系”,由本实验原理可知不需要打点计时器,故D错误
。故选A。(2)由𝑚−𝑥图像是过原点的倾斜的直线可知弹簧的弹力与弹簧的伸长量成正比,由𝐹=𝑚𝑔=𝑘𝑥,可得𝑘=Δ𝐹Δ𝑥=200×10−3×108×10−2N/m=25N/m故A正确。(3)A.由胡克定律可知𝐹=𝑘𝑥=𝑘(𝐿−𝐿0)=𝑘𝐿−𝑘𝐿0当F
=0时,弹簧的长度等于原长,由图可知𝑎的原长比𝑏的短,故A错误;BD.F-L图像的斜率表示弹簧劲度系数,斜率越大劲度系数越大,弹簧a的斜率大,可得a的劲度系数比b的大,故B正确,D错误;C.在弹性限度内,弹簧弹力与弹簧形变量成正比
,故C错误。故选B。17.如图1所示,“验证力的平行四边形定则”的实验步骤如下:①用两个相同的弹簧测力计沿细绳互成角度拉套在橡皮筋结点的细绳套,使橡皮筋伸长,结点到达纸面上某一位置静止,记为O;②记录两个弹簧测力计的拉力𝐹1和𝐹2的大小和方向;③
只用一个弹簧测力计拉绳套,使结点仍到位置O,记录弹簧测力计的拉力F的大小和方向;④按照力的图示要求,作出拉力𝐹1、𝐹2、F;⑤根据力的平行四边形定则作出𝐹1和𝐹2的合力𝐹′;⑥比较F与𝐹′的大小、方向的一致程度。(1)下列实验操作合理的是A.实验前,将两测力计水
平互拉,选择读数始终相同的两弹簧测力计B.实验中,弹簧秤必须保持与木板平行,读数时视线要正对弹簧秤刻度C.橡皮筋应与两绳夹角的平分线在同一直线上D.实验中施加的力应适当大一些,可减小实验的相对误差。(2)尊重实验事实,
重视实验中的原始数据记录,是一项重要的科学探究素养。①小赵同学在实验中确定𝐹1与𝐹2的方向时,先标记了O点,然后分别标了a、b点,如图2所示,从减小实验误差的角度判断,标记得更为妥当的是(选填“a”或“b”)点
;②下图A、B、C、D分别为小张、小吴、小周、小刘四位同学提交的实验报告中的实验记录,符合实验事实的是。【答案】(1)ABD(2)①a②A【知识点】验证力的平行四边形定则的原理和实验步骤、验证力的平行
四边形定则的注意事项和误差分析【详解】(1)[1]A.实验前,将两测力计水平互拉,两测力计之间的力为相互作用力,其大小相同,所以应该选择读数始终相同的两弹簧测力计,故A项正确;B.实验中,为了减少实验的误差,所以弹
簧秤必须保持与木板平行,读数时视线要正对弹簧秤刻度,故B项正确;C.橡皮筋应与两绳夹角的平分线可以不在同一直线上,故C项错误;D.为减小实验的相对误差,实验中施加的力应适当大一些,故D项正确。故选ABD。(2)[2]题图中标记ab两点的目的是为了确认力的方向,而为了减少实验
误差,所以两点应该尽量的远一些,故a点更妥当。[3]由题意可知𝐹′是理论值,其应该是平行四边形的对角线,而F是测量值,其方向与AO在同一直线上。故选A。三、计算题:本题共4小题,共40分。解答应写出必要的文字说明、方程式和重要演算步骤。只写出最后答案的不
能得分。有数值计算的题,答案中必须明确写出数值和单位。18.某同学在水平地面上推沙发,沙发的质量m=30kg,该同学给沙发施加了水平向右的推力F=80N,但没有推动。重力加速度g=10m/s2。(1)请在虚线框中画出沙发的受力示意图;(2)求沙发所受的摩擦力大小f;(3)若该同学给
沙发施加水平向右的推力F1=140N,沙发运动起来。已知沙发和地面间的动摩擦因数μ=0.4。求沙发在运动过程中所受的摩擦力大小f1。【答案】(1);(2)80N;(3)120N【知识点】滑动摩擦力的大小与方向、复杂受力情况下计算静摩擦力的大小【详解】(1)沙发受到重力G,地面对它的
支持力N及静摩擦力f,人施加的推力F,如图所示。(2)根据平衡条件有f=F=80N(3)沙发受到水平向左的滑动摩擦力,大小为𝑓1=𝜇𝑁𝑁=𝑚𝑔得𝑓1=120N19.如图所示为四旋翼无人机,它是一种能够垂直起降的
小型遥控飞行器,目前得到越来越广泛的应用。若无人机在距离水平地面高度h=20m处悬停并释放一包裹,不计空气阻力,重力加速度为g取10m/s2。(1)求包裹在空中运动的时间t;(2)求包裹落地时速度v的大小;(3)以包裹释放时为计时起点,竖直向下为正方向,画出包裹运动速度随时间变化的v-t图像,并说
明图像斜率的物理意义。【答案】(1)2s;(2)20m/s;(3)见解析【知识点】自由落体运动的三个基本公式【详解】(1)包裹脫离无人机后做自由落体运动,有ℎ=12𝑔𝑡2解得𝑡=√2ℎ𝑔=2s(2)包裹落地时的速度v=gt解得�
�=√2𝑔ℎ=20m/s(3)包裹运动速度随时间变化的v-t图像如图由v=gt可知v-t图像的斜率表示重力加速度g。20.用三根轻质细线a、b、c将重力为2𝐺的小球1和重力为G的小球2连接并悬挂,如图所示,两小球处于静止状态,
细线a与竖直方向的夹角为𝜃=30°,细线c水平。(1)求细线a、c分别对小球1和2的拉力大小;(2)求细线b对小球2的拉力。【答案】(1)2√3𝐺,√3𝐺;(2)2𝐺方向,与水平方向夹角30°【知识点】整体法与隔离法结合处理物
体平衡问题【详解】(1)对1、2小球整体进行受力分析得𝐹𝑎=3𝐺cos𝜃=2√3𝐺𝐹𝑐=3𝐺tan𝜃=√3𝐺(2)设细线b与水平方向的夹角为𝛼,对c球受力分析得tan𝛼=𝐺𝐹𝑐=√33解得𝛼=30°则𝐹𝑏=𝐺sin𝛼=2𝐺方向:与水平方向夹角
30°。21.无人驾驶汽车是智能汽车的一种,也称为轮式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪实现无人驾驶。(1)无人驾驶汽车车头装有一个激光雷达,就像车的“鼻子”,随时“嗅”着前方80m范围内车辆和行人的“气息”。无人驾驶汽车在某路段刹车时的加速度
大小为3.6m/s2,为了不撞上前方静止的障碍物,汽车在该路段匀速行驶时的最大速度是多少?(无人驾驶汽车反应很快,可以忽略反应时间)(2)若无人驾驶汽车正以30m/s的速度行驶,突然“嗅”到其正前方50米处有一人工驾驶的汽车以20m/s的速度向前匀速行驶,无人驾驶汽车立即做加速度恒定的减
速运动。为了防止发生追尾事故,请你计算无人驾驶汽车减速过程中的加速度满足什么条件?【答案】(1)24m/s;(2)无人驾驶汽车至少以1m/s2的加速度做匀减速直线运动【知识点】匀变速直线运动速度与位移的关系、避免相撞类问题【详
解】(1)以运动方向为正方向建立一维坐标系。假设汽车到达障碍物处速度刚好减到0由2ax=0-v02得v0=24m/s汽车匀速行驶的最大速度是24m/s(2)假设无人驾驶汽车的加速度为a,则速度与位移的表达式v无=v
o+at=30+atx无=vot+12at2=30t+12at2人工驾驶汽车的速度与位移的表达式v有=20m/sx有=v有t=20t设经过时间t两车速度相等,此时两车恰好不相撞,即v无=v有30+at=20x有+50=x无20t+50=30t+
12at2得a=-1m/s2所以无人驾驶汽车至少以1m/s2的加速度做匀减速直线运动。


